01: Introduction & Documentation
Assignment
Create a website and sketch up an idea for a possible final project.
You will use this website to document your work for the rest of the semester. You are welcome to use any tools you’d like to accomplish this, but if you don’t have any previous web development experience, you’ll likely want to stick with the Jekyll template we covered in class. You’re encouraged to use the HTML and CSS techniques we covered in class to cutomize your site – even better if you research new techniques and make a novel website. You can also continue to update your website styling/layout for the rest of the semester. The goal for this week is to make the site functional, i.e., that you’re able to use it to host your assignments in a way that others are able to find them. Please make sure your website is up and running, including your final project idea by this Thursday.
Your website must include:
- An index.html page that contains links to each assignment page
- An “About” page, including a short paragraph about yourself (hobbies, interests, and why you’re taking this course)
- Some customization using HTML and CSS
- A final project proposal (you can use the Final Project page of the template)
Feel free to discuss final project ideas with the teaching staff and with each other. The projects we showed at the beginning of class might give you an idea of the range of possibilities. It’s okay to propose something ambitious; the teaching staff will work with you to scale your idea to a tractable amount of work for the course. Take a look through all the topics we’ll cover. Final projects should integrate most of the skills covered over the semester, including at a minimum:
- 3D design and fabrication (either mold/cast, 3D print, lasercut, etc.)
- Electronics (input and output)
- Microcontroller programming
Website Design
Using the Jekyll theme that was provided to us, I constructed an index.html and about page. The index page does not appear to be any different from my normal home page, but it still conveniently lists the links to all my assignments.
I customized my website using Matt Graham’s Leap Day theme for Github pages. I did a bit of tweaking by replacing some of the images and changing some of the links built into the theme. In particular, I changed the links on the yellow banner, which normally link to my changelog page and all my downloadables, to instead link to my Home and About pages. In other words, this:
<div id="banner">
<span id="logo"></span>
<a href="{{ site.github.repository_url }}" class="button fork"><strong>Home</strong></a>
<div class="downloads">
<span> </span>
<ul>
<li><a href=""{"{ site.github.zip_url "}""}" class="button">About</a></li>
<li><a href="https://github.com/kem406/PHYS-S12/tarball/master" class="button">Contact</a></li>
</ul>
</div>
</div><!-- end banner -->
was changed to this:
<div id="banner">
<span id="logo"></span>
<a href="https://kem406.github.io/PHYS-S12/" class="button fork"><strong>Home</strong></a>
<div class="downloads">
<span> </span>
<ul>
<li><a href="https://kem406.github.io/PHYS-S12/about/" class="button">About</a></li>
<li><a href="https://kem406.github.io/PHYS-S12/contact/" class="button">Contact</a></li>
</ul>
</div>
</div><!-- end banner -->
I also took the liberty of constructing my own contact info page.
Here are the images I used:

The first image is a transparent .png stock image placed in front of a black background. I have no idea where the second image came from, it was a very old image sitting in my computer’s files, though it does make a nice seamless looping texture.
I may change the images in the future, so here is a screenshot of what my website currently looks like:
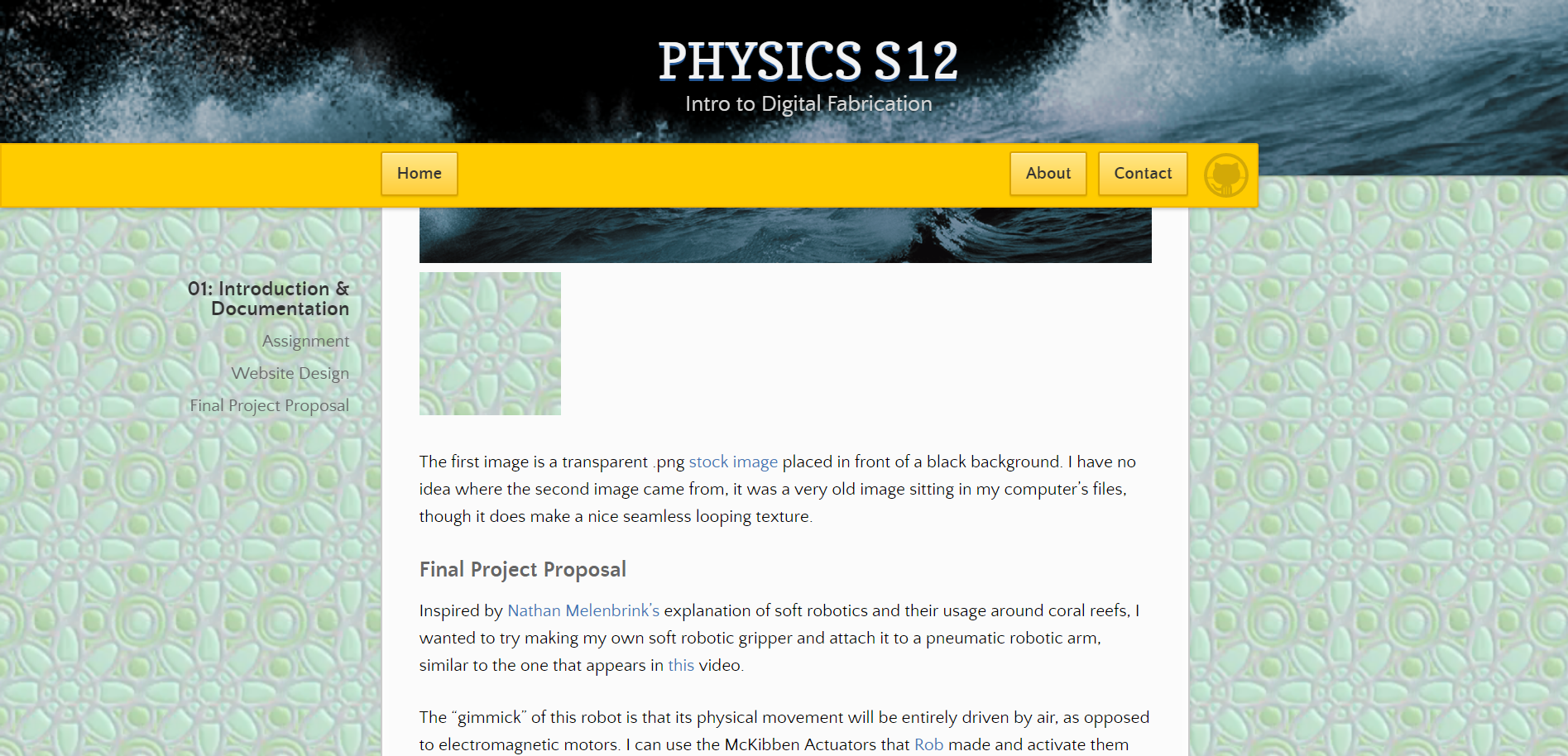
Final Project Proposal
Inspired by Nathan Melenbrink’s explanation of soft robotics and their usage around coral reefs, I wanted to try making my own soft robotic gripper and attach it to a pneumatic robotic arm, similar to the one that appears in this video.
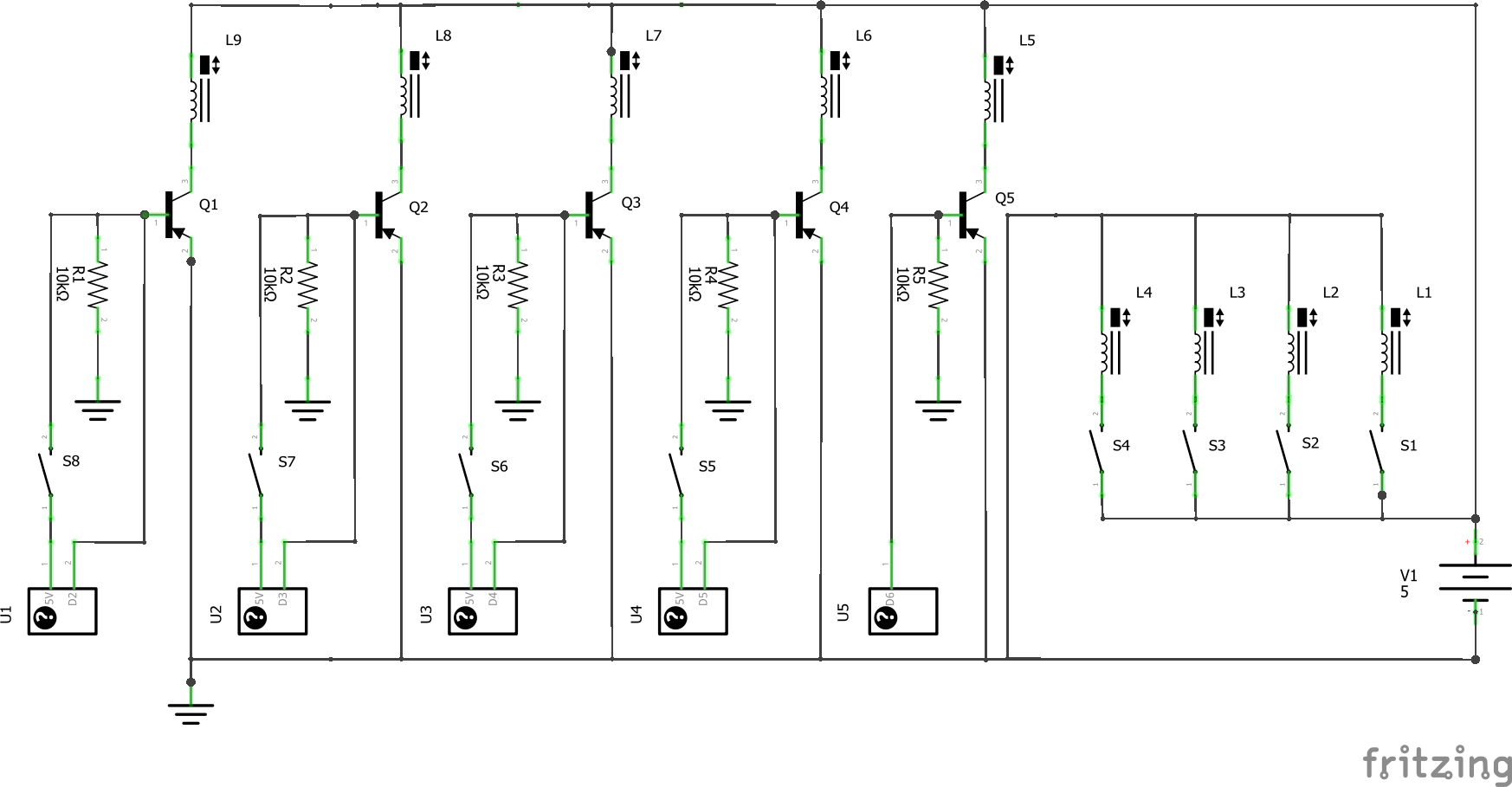
The “gimmick” of this robot is that its physical movement will be entirely driven by air, as opposed to electromagnetic motors. I can use the McKibben Actuators that Axel Kilian and Rob made and activate them using solenoid air valves, and the soft robotic gripper (details of which can be found here) can be inflated using an air pump motor.
Here is a sketch I made showcasing a possible configuration of the robot arm:
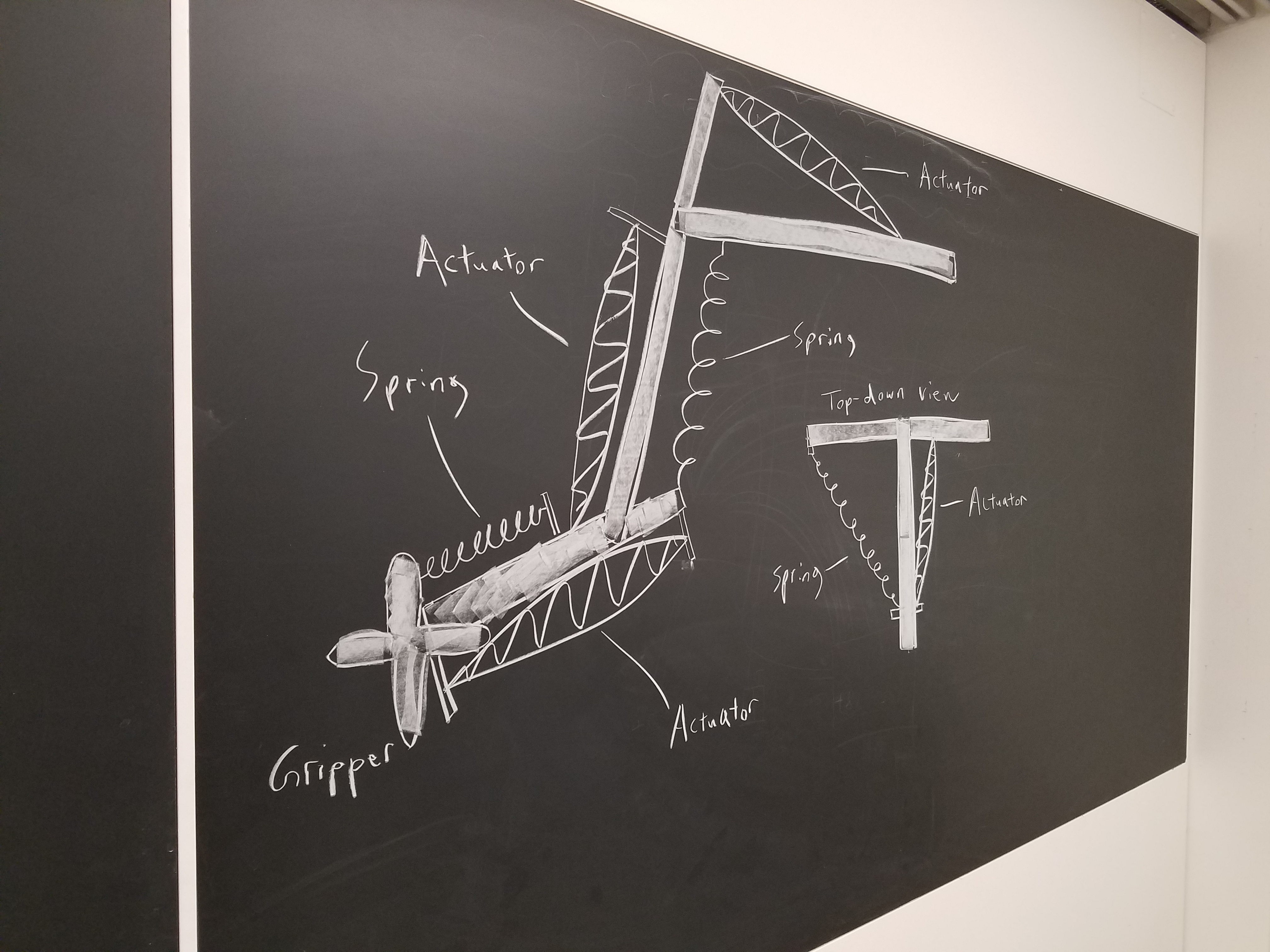
I will document the progress of my pneumatic arm on the Final Project page.