10: Molding & Casting
Assignment
Design a 3D mold, machine it, and cast material in it.
Creating a Miniature Soft Gripper
At first, I used the tiny mold I 3D printed in session 6 to try making a soft gripper.
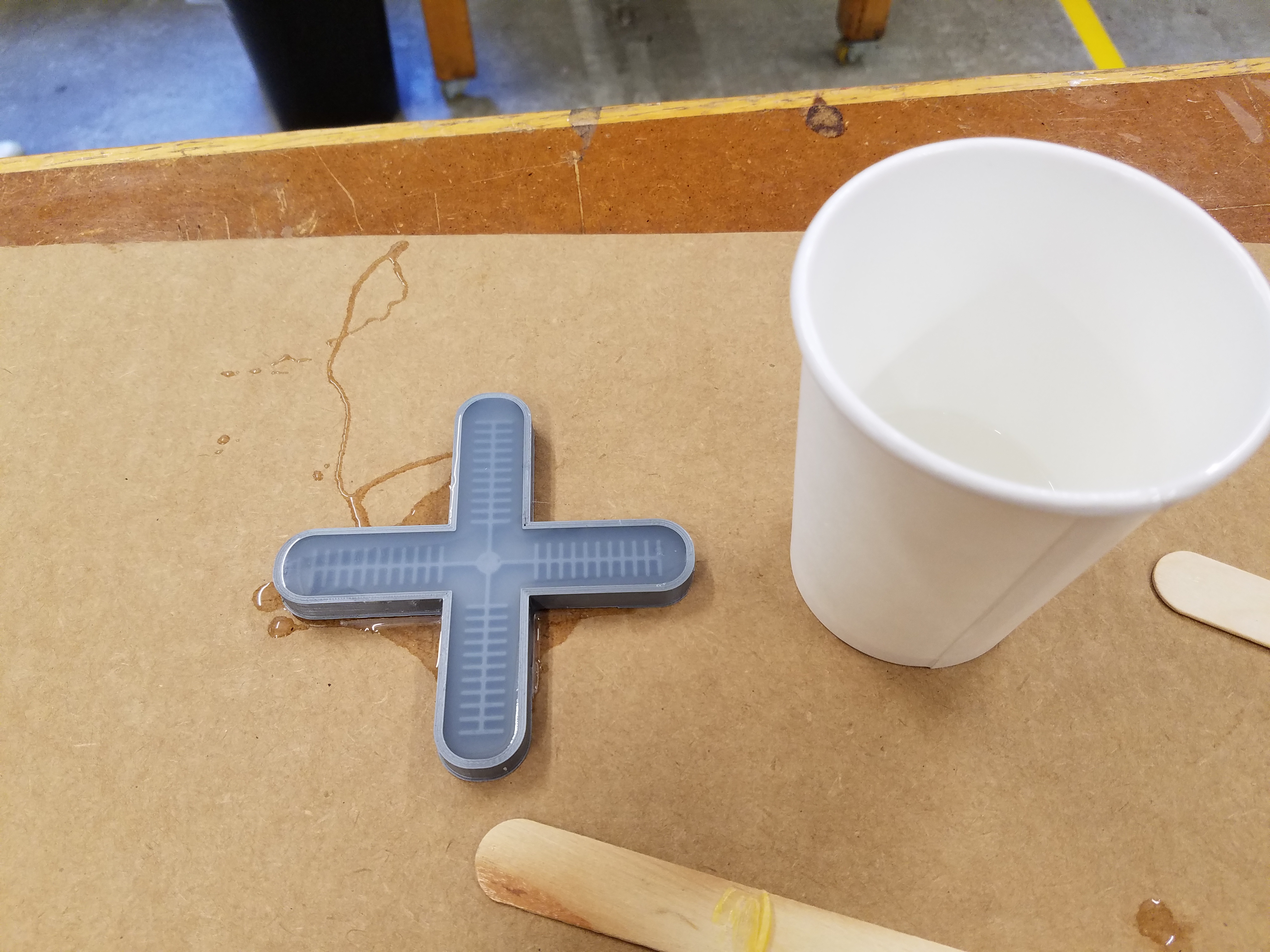
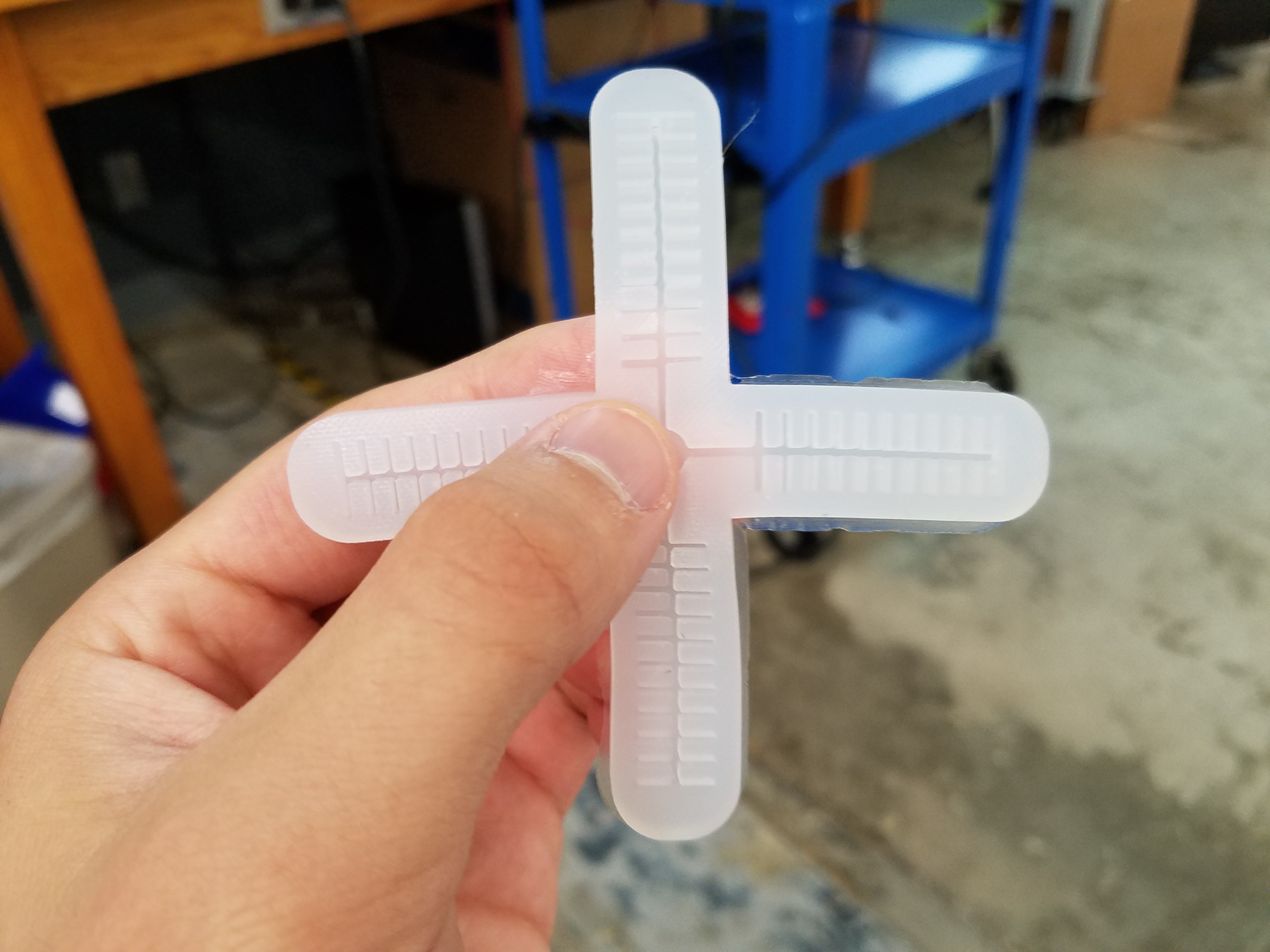
I poured a substance called Ecoflex silicone into the mold, which involves mixing two different parts A and B into a single cup before pouring. After the mold cured in about four hours, I ended up with a nice looking upper half of a soft gripper:
I mixed up some more Ecoflex and tried using it as glue to attach the upper half to a piece of silicone that already had some fabric attached to it, but the resulting soft gripper did not work whatsoever. I think the problem with it was two-fold: one, I used too much of the Ecoflex to glue the pieces together, causing some to get into the air cavities; and two, the mold I used was really tiny and therefore already did not have much air space to work with in the first place.
Creating a Larger Yellow Gripper
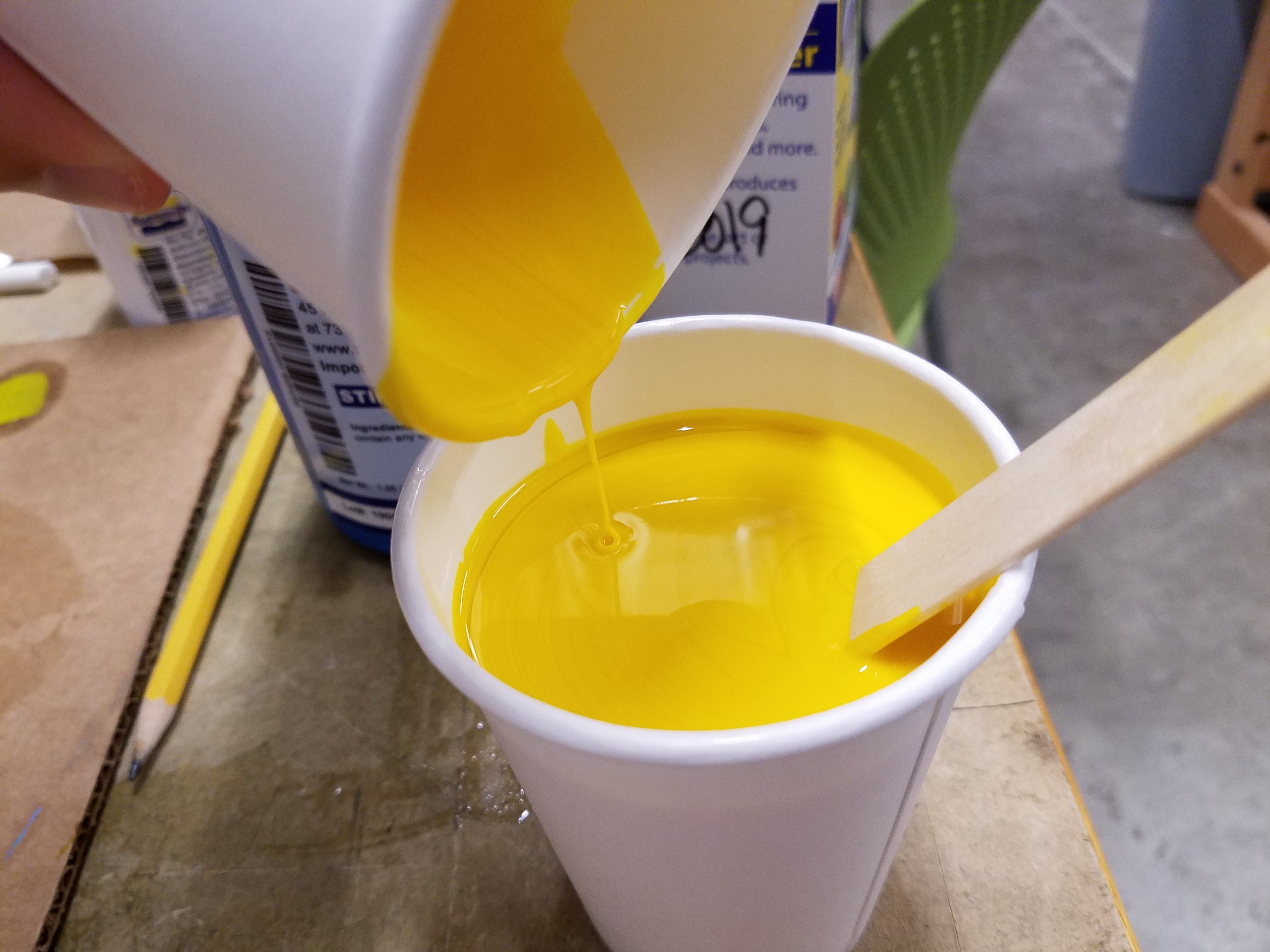
I wanted to make my soft grippers more attractive-looking, so I used something called Silc Pig to dye the Ecoflex bight yellow. I bought the Silc Pig from Reynolds Advanced Materials in Brighton, and according to the staff there, it works best when you mix it in with part B of the Ecoflex before you combine both parts.
For the fabric, I laser cut some yellow nylon I found in the fabric bin. I cut it to the same exact dimensions as the lower half mold I designed in session 6.
This fabric fit snugly into the bottom mold. As Nathan put it, precision is one of the benefits of digital fabrication.
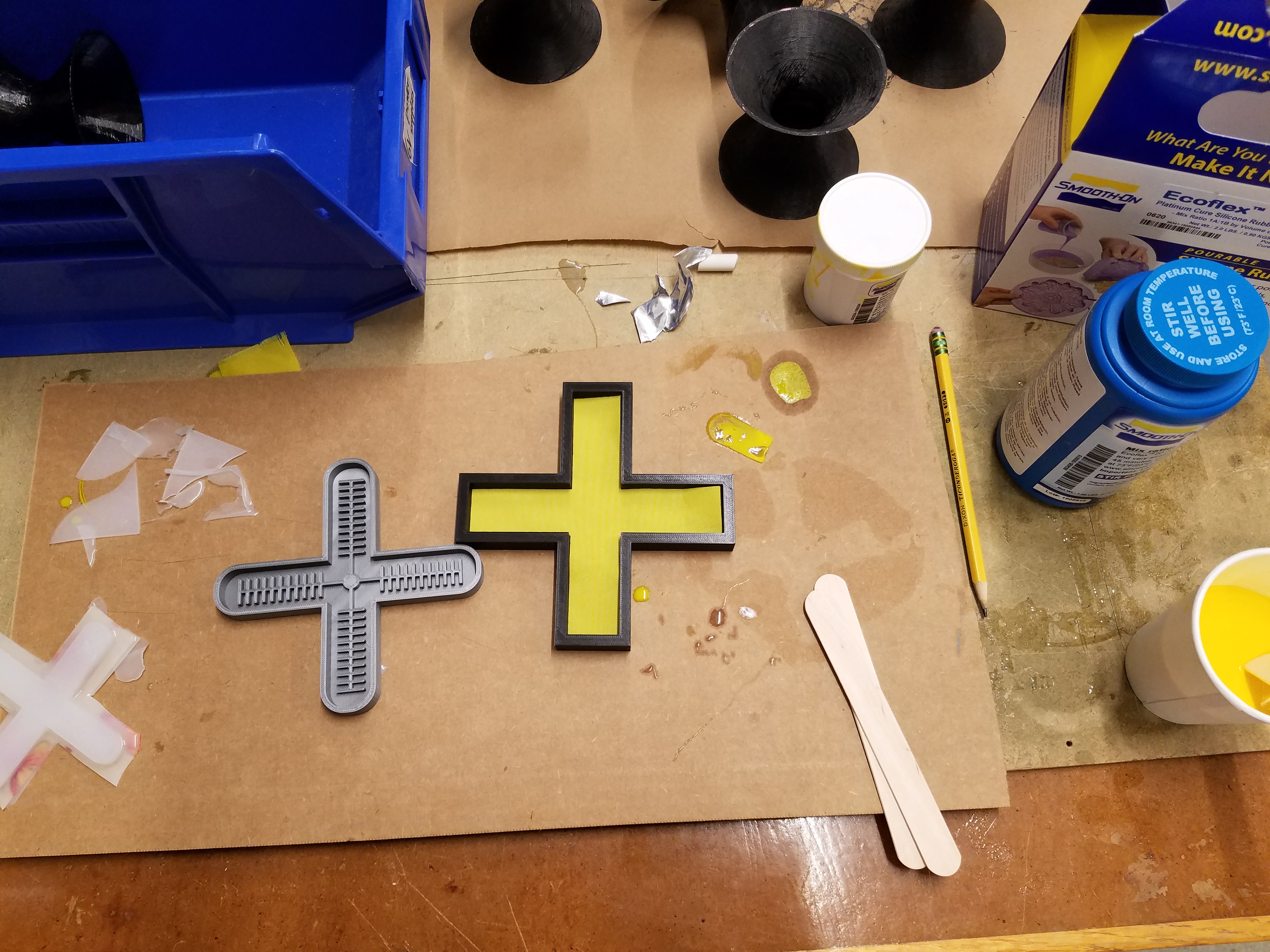
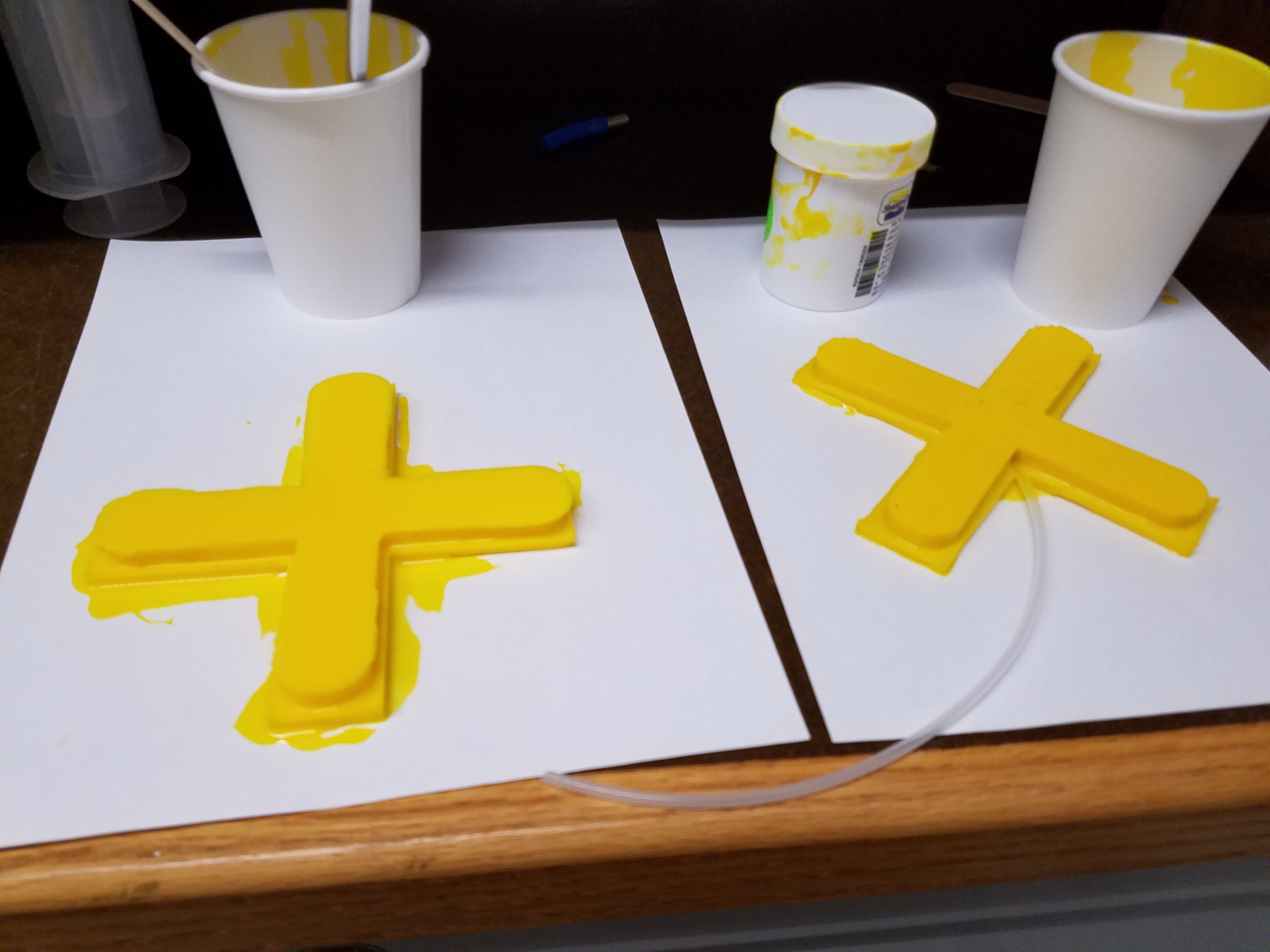
I poured the Silc-Pig-dyed Ecoflex into both this mold and the larger upper half mold from session 6:


These are now left to cure for a while.

Troubleshooting

I repeated this process many times, and I ran into many problems along the way. The first time I tried to make a large gripper, I tried to take an upper half that was already cured and place it on top of a lower half as it was still in the process of curing, and it was my hope that they would bond without needing to use Ecoflex as glue. However, this just resulted in the upper half sinking to the bottom of the lower half, creating a soft gripper where both halves are completely merged. The nylon also turned out to be not so great at bonding to the silicone, and actually floated to the top of the curing Ecoflex while it was still viscous. In future attempts, I would use double sided tape to prevent this.
The next time I tried to make a large gripper, I let both halves fully cure, and tried to use Ecoflex as a glue again.
I tried this with two soft grippers, but they both ran into the same problem. Even though I tried my best, the glue did not spread evenly, and there were uneven air pockets within the gripper as a result. Whenever air was pumped into the grippers, the air would immediately try to fill these voids, since currents want to take the path of least resistance. When the air filled these pockets, that particular area would expand rapidly and eventually pop. I could fix these ruptures with silicone Gorilla Glue, but this would only cause air to gravitate towards another pocket and the process would repeat. Fixing these grippers with Gorilla Glue would be tedious and would take forever.
Finally, after both halves were cured, I took the bottom half, flipped it over, placed it inside the bottom mold again, and poured in another thin layer of Ecoflex. I then placed the upper half on top, essentially treating the new layer as a perfectly-spread layer of glue. This finally did the trick!